
微型旋翼无人机地面控制系统是测试无人机的飞行特性,为进一步开发无人机打好基础。由于旋翼无人机的垂直起降、可悬停等特点,此无人机的最大特点就是能够垂直起飞和降落,可以飞至离目标更近的区域,而不像传统直升机由于其巨大的旋翼不能靠近目标,也正是这个原因,微型旋翼无人机对控制系统的要求极高。
旋翼无人飞行器系统具有典型的CompactRIO应用设计结构。我们使用NI LabVIEW Real-Time 开发模块将通过FPGA 读取的飞行数据存储在嵌入式控制器上,利用PID控制算法得到实时的控制信号发送给电机和舵机。利用MAX软件开发CompactRIO设备与PC机得以太网通信。在地面控制台,我们使用笔记本电脑用LabVIEW开发了友好的人机交互界面来实时显示无人机的飞行信息。
NI 的CompactRIO 在这个项目的开发中起了核心的作用,它的易用性,可靠性以及可编程性对旋翼无人机的控制已经足够。它大大的缩短了无人机的开发周期,是测试无人机飞行特性系统的理想选择。以后,我们要用更多的传感器,更充分的发挥CompactRIO的强大功能,最终实现智能飞行。如果此控制系统硬件由实验室自主开发,首先开发周期长,包括硬件设计、原型建造、软件设计和编程、软件测试、系统测试等将会花费掉大量的时间和金钱,而如果选用NI CompactRIO 作为系统架构,将会省掉整个硬件设计和调试周期,使我们将大部分精力放在软件调试和系统验证上,大大缩短了开发周期。微型旋翼无人机在基于CompactRIO平台的控制下,成功实现了6s悬停。
在2011年的日本大地震中,美国就曾利用类似此非常规布局的旋翼飞行器对福岛核电站的核泄漏情况进行勘察和记录并很好的完成了任务。可想而知,此类飞行器在不久的将来会有很大的发展。
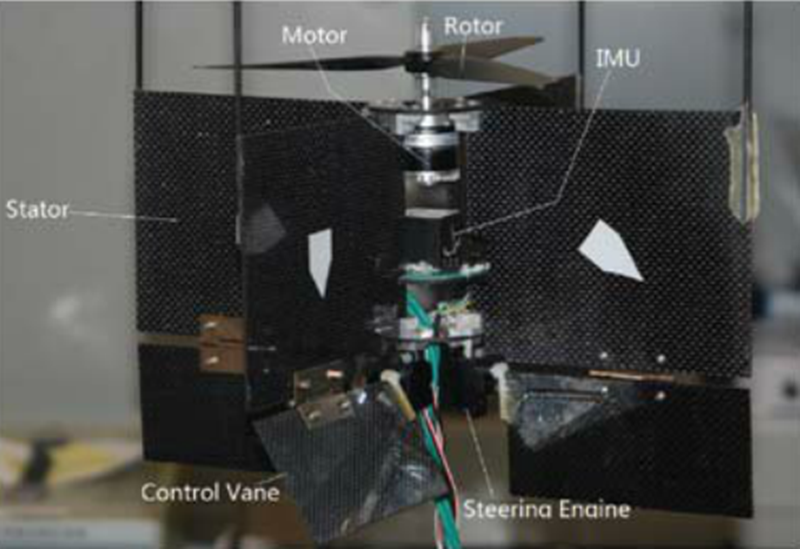
微型旋翼无人机地面控制系统